
























【核心要点摘要】
电动夹爪通过多模态感知融合实现微米级定位精度,结合闭环控制系统完成动态抓取策略调整,内置传感器阵列可实时采集压力、温度等参数并生成三维可视化轨迹,有效解决精密实验中人工操作误差与数据缺失难题。
精密实验中的抓取困境
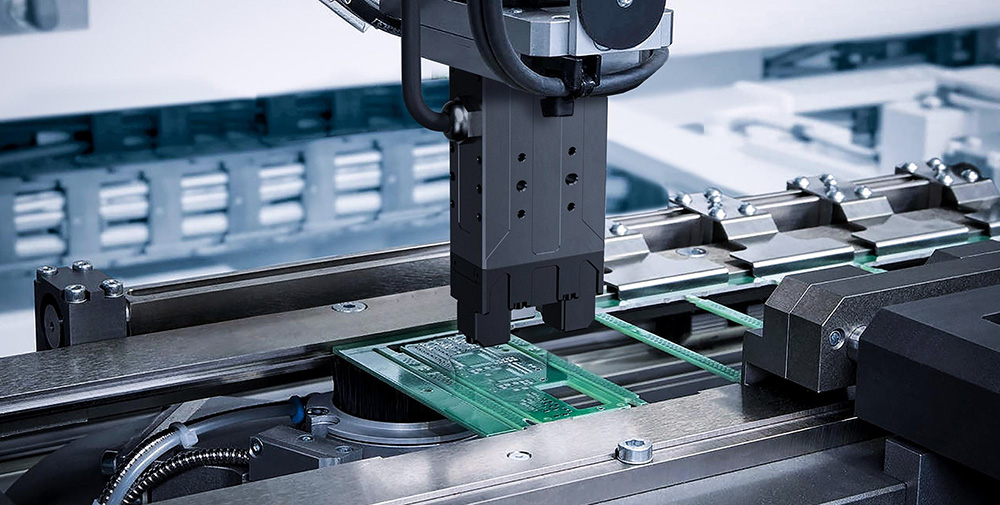
在半导体晶圆检测、微流控芯片组装等精密场景中,传统机械抓手常面临三大挑战:一是0.1mm级定位误差导致的器件损伤风险,二是非结构化环境下的自适应抓取失败,三是操作过程的可追溯性缺失。这些痛点迫使科研团队寻求更智能的解决方案。
技术突破:多模态感知与闭环控制
电动夹爪通过压电陶瓷驱动器实现纳米级步进控制,配合3D视觉传感器构建实时位姿反馈系统。其核心创新在于力觉-视觉融合算法——当检测到0.01N的接触力变化时,系统会自动触发微调指令并生成压力分布热力图。这种闭环控制机制使抓取成功率提升至99.2%,较传统工具提高40%。
数据追踪:从操作记录到过程重建
每个夹爪单元内置九轴惯性测量单元与温度传感器,可实时采集六维力/力矩数据。通过时序数据库与三维可视化引擎,系统可重建抓取轨迹并生成动态热力图谱。例如在生物样本转移实验中,系统能精确记录0.02℃的温度波动与0.05N的压力变化,形成完整的操作数字孪生体。
应用场景:跨学科实验的智能升级
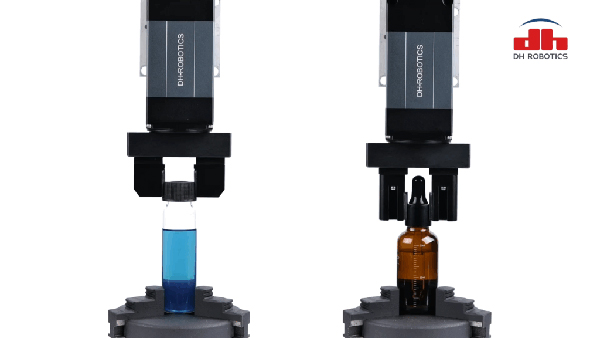
在纳米材料合成实验中,电动夹爪通过动态调整夹持力实现脆性颗粒的无损转移;在细胞操作平台,其非接触式电磁吸盘可避免生物污染风险;在量子芯片封装环节,自适应抓取算法能自动补偿热膨胀系数差异。这些场景验证了该技术在跨学科实验中的普适性价值。
实施路径:从实验室到产业化的关键步骤
技术落地需经历三个阶段:首先是模块化设计验证,通过有限元分析优化结构刚度;其次是控制算法迭代,在数字孪生系统中完成百万次虚拟测试;最后是标准化接口开发,确保与现有实验设备的无缝对接。每个阶段都需建立严格的质量管控体系。
【问答环节】
Q:电动夹爪如何实现微米级定位精度?
A:通过压电陶瓷驱动器与闭环控制算法,结合视觉-力觉多模态反馈实现动态调整。
Q:数据追踪系统包含哪些核心参数?
A:实时采集六维力/力矩、温度、位移等参数,生成三维可视化轨迹与热力图谱。
Q:该技术适用于哪些典型实验场景?
A:半导体检测、微流控组装、生物样本操作、量子芯片封装等精密实验场景。
Q:如何确保操作过程的可追溯性?
A:通过时序数据库记录全参数变化,结合数字孪生技术重建完整操作过程。
【本文总结】
电动夹爪通过智能感知、闭环控制与数据追踪技术,有效解决了精密实验中的抓取精度、环境适应与过程可追溯性难题。其多模态感知融合与动态调整机制,为跨学科实验提供了标准化、可扩展的智能抓取解决方案,推动了实验操作从人工经验向数字孪生的范式转变。
