

























大寰机器人亮相 2026 世界人工智能大会
简介
大寰机器人很高兴宣布将参展 2026 世界人工智能大会(WAIC),这是全球顶尖的人工智能与机器人行业展会之一。 诚邀各位莅临上海展区,一同体验我们在灵...
查看详情

⼤寰幸混⼀,四海际幅员。
—— 引⾃ 元 · 吴莱《⼤⻝瓶》
“DH”的灵感来⾃“Denavit和Hartenberg于1955年⾸次提出的D-H模型”,
该模型描述了机器⼈连杆和关节之间的相互关系。
国内电动执行器销量
国家和地区
产品系列覆盖多个行业
过去5年的复合增长率
累计发货的产品
智能制造行业客户行业第一
企业使命
提升制造业柔性与智能
企业愿景
成为全球运动执⾏器领导者
核⼼价值观
以客户为中⼼ 实事求是
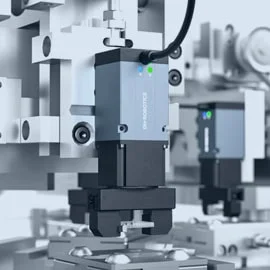
业界领先的直驱⼒反馈技术,可实时反馈所有相关数据,能够在作业过程中实时感知并检测问题。结合运动规划算法优化及补偿调整,满⾜各种特殊作业要求。
通过精密的传动设计+⾼精度的控制相结合,⼤寰打造出⼒控精度⾼、⾏程精准、速度可控、⾃适应控制、低电磁⼲扰等特点,良好适配⾼精度与可靠性要求⾼的⼯业制造场景。

⼀体化集成设计,在本体⼩型化的基础上,实现驱动与控制⼀体,并提供最⼤的产品性能与更⾼的精度。客户可以轻松完成个性化配置,实现模组⼩型化,适应⾼柔性的场景。




广东省机器人灵巧手工程技术研究中心
“重点小巨人”国家级专精特新企业
国家级专精特新“小巨人”企业
第七届深圳市⾃主创新百强中⼩企业
深圳市“专精特新”企业认定
年度深圳市⼗佳中⼩企业创业英才
德勤中国⾼科技⾼成⻓50强
深圳⼈⼯智能协会⼗⼤⼒⽵之星
深圳⼈⼯智能协会⾼质量发展领军企业
投资价值企业⾼⼯机器⼈
数字富⼠康⽣态合作伙伴
⼯业设计⼤奖红点奖
明珠奖“末端执⾏器技术”
年度创新技术⾼⼯⾦球奖
⼯业设计⼤奖-IF奖
国家⾼新技术企业
⾼⼯年度机器⼈好产品
第⼋届中国(深圳)创新创业⼤赛先进制造⾏业团队组⼀等奖
坚持研发创新,提升企业核⼼竞争⼒。
获得授权专利
发明专利
实⽤新型专利
外观设计专利
计算机软著

戴建生院士,大寰机器人首席科学家,英国皇家工程院院士,欧洲人文和自然科学院院士,国际理论运动学与可重构机构学机器人学权威专家。现为南方科技大学机器人研究院院长,国际机器人旗舰期刊 Robotica Editor-in-Chief,高等教育出版社“机器人科学与技术”丛书主编,伦敦国王学院终身荣誉教授。
戴建生院士在机构学与机器人学领域耕耘多年,曾先后获得 ASME 颁发的 Mechanisms and Robotics Award(机构学机器人学终身成就奖,2015 年)与 Machine Design Award(机械设计终身成就奖,2020 年) ,享誉世界。
“……在戴建生院士率领下,经过20年深耕,建立了机器机构演化理论体系,开展了机器机构演变机理研究,完成了大量原创且国际领先的工作,创立了变胞机构和可重构机构新研究领域。”
——人民日报
“为建立可重构机构领域和变胞机构子领域做出了开拓性与奠基性贡献;并通过研究、应用、教学和服务对机械设计产生了持久性影响,弥合了通用但昂贵的机器人与高效但不灵活的机器之间的鸿沟。”
——ASME 机械设计终身成就奖
大寰团队拥有深厚的技术背景。三位联合创始人师从机构学与机器人学领域的学术泰斗戴建生教授,在相关领域有多年研究。

伦敦国王学院博士、博士后,本科毕业于清华大学。孙杰博士参与过“欧盟第七框架”中的三个机器人项目,并曾于2011年夺得美国ASME灵巧手抓取比赛冠军。

灵巧手设计、电机驱动专家,伦敦国王学院机器人学博士,本科毕业于天津大学。张新生博士亦有参与过“欧盟第七框架”中的三个机器人项目。

伦敦国王学院硕士,本科毕业于上海交通大学,联合创办大寰机器人前,曾有任职于工业测量仪表行业的全球领导企业Endress+Hauser的三年产品经理经验。
⼤寰机器⼈深圳研发总部汇聚了⾏业顶尖的技术研发团队,致⼒于推动智能制造和精密⼒控技术的创新与应⽤。
⼤寰机器⼈东莞制造中⼼是公司核⼼的⽣产基地,配备先进的⽣产设备和严格的质量管理体系,确保⾼效、精准的产品交付。

快速响应
30分钟内响应客户问题,24⼩时内提供远程解决⽅案。
专业服务
提供需求评估、技术咨询、质量监督等全套售后服务。
⾼效解决
现场分析与处理,确保快速⾼效解决问题。
如有任何问题,欢迎联系我们的售后团队:
售后邮箱:[email protected]





⼤寰机器⼈与全球数百家⼯⼚和领先企业携⼿合作,产品与服务已⼴泛应⽤在3C、半导体、新能源、汽⻋等领域,为客户降低⽣产成本、提⾼⽣产效率,共同推动⾏业创新与发展。


























 微信扫一扫
微信扫一扫
"*" 为必填字段