
























在智能工厂的浪潮中,自动化夹爪作为机器人末端执行器的核心部件,正经历着从传统气动向电动化的技术迭代。当3C电子产线需要夹持0.1mm厚度的柔性电路板,当汽车工厂要求机器人同时处理不同尺寸的发动机部件,传统气动夹爪的局限性日益凸显。这场动力革命背后,究竟隐藏着怎样的技术逻辑?
一、动力源革命:从压缩空气到伺服电机的技术跃迁
传统气动夹爪依赖空压机产生的压缩空气驱动,通过气缸活塞运动实现开合。这种结构虽然具有快速响应特性,但存在致命缺陷:气压波动会导致夹持力不稳定,气路泄漏风险使洁净车间存在油污污染隐患。某半导体封装企业的案例显示,使用气动夹爪时产品良率因微尘污染下降12%。
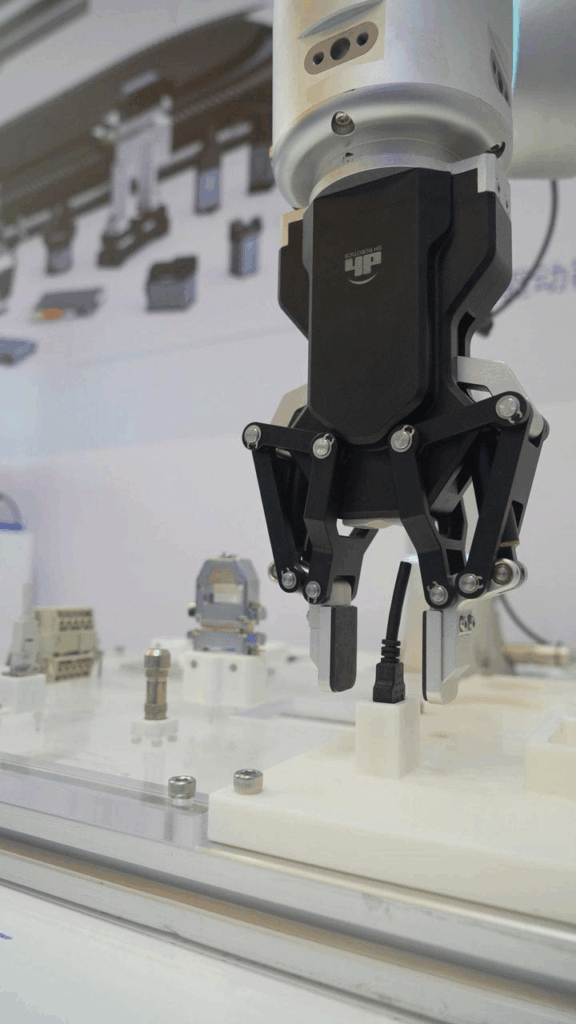
电动平行夹爪采用伺服电机驱动,通过减速器将旋转运动转化为直线开合。其核心优势在于力控精度可达0.01N级别,位置控制误差小于0.005mm。在医疗设备组装场景中,这种精度确保了0.2mm直径的微球能被稳定抓取,而不会因夹持力过大导致变形。
二、控制维度突破:从二位开关到智能决策的进化
气动系统的控制逻辑本质上是二位式开关控制,仅能通过电磁阀实现全开/全闭两种状态。这种模式在标准包装线上尚可应付,但面对多品种混流生产时,频繁更换夹爪规格的成本高达设备投资的30%。
电动夹爪实现了控制维度的三维突破:
位置闭环:通过编码器实时反馈爪尖位置,可编程设定256个以上停靠点
力觉闭环:电流环控制实现夹持力连续调节,避免对精密工件的损伤
轨迹规划:支持S型加减速曲线,确保高速运动中的平稳抓取
某汽车零部件企业的实践表明,采用电动平行夹爪后,机器人换型时间从45分钟缩短至8分钟,设备综合效率(OEE)提升18%。
三、系统集成变革:从复杂管网到即插即用的简化
气动系统部署需要铺设直径10mm以上的气管网络,空压机站房占地面积达设备区的15%。某消费电子工厂的改造数据显示,气动方案使车间噪音值达到78dB,而电动方案可将噪音控制在62dB以下。
电动夹爪采用总线通信(如EtherCAT),仅需电源线和通讯线即可完成部署。其模块化设计支持快速更换夹爪手指,在3C产品换型时,手指更换时间从2小时压缩至15分钟。这种灵活性使小批量多品种生产模式的设备利用率提升40%。

四、应用场景重构:从重载搬运到精密操作的跨界
气动夹爪在重载场景(>50kg)仍具有成本优势,其瞬间出力特性适合金属冲压件的上下料。但在精密装配领域,电动夹爪展现出不可替代性:
半导体行业:晶圆搬运要求夹爪表面粗糙度Ra<0.4μm,电动方案通过陶瓷涂层技术实现
生物医药:试管抓取需要无菌设计,电动夹爪采用一次性硅胶指套
柔性制造:结合视觉系统实现异形件自适应抓取,某物流中心分拣准确率提升至99.97%
常见问题解答
Q1:电动夹爪的维护成本是否高于气动方案?
A:电动夹爪维护集中在驱动器与电机,生命周期内故障率比气动阀低60%,但需定期检查编码器精度。
Q2:气动夹爪能否通过技术升级达到电动精度?
A:即使采用比例阀控制,气动系统仍受空气可压缩性限制,力控精度难以突破0.5N量级。
Q3:电动夹爪的响应速度是否满足高速产线需求?
A:现代伺服电机可实现200ms内的全行程开合,配合预抓取轨迹规划,实际节拍与气动方案持平。
Q4:洁净车间必须选择电动夹爪吗?
A:ISO 5级洁净室要求颗粒物<3.5μm,气动系统的油雾过滤成本是电动方案的3倍。
Q5:混合动力夹爪是否代表未来方向?
A:气电复合夹爪在特定场景具有优势,但系统复杂度导致故障率上升40%。
本文总结
电动平行夹爪与气动夹爪的技术分野,本质是精密制造与重载运输的需求差异。在工业4.0时代,当生产线需要同时处理0.1g的电子元件与50kg的金属铸件时,混合部署策略正在兴起。但可以预见的是,在精度要求0.01mm级、力控精度0.1N级的未来工厂,电动技术将占据主导地位。这场动力革命不仅改变着夹爪本身,更在重塑整个柔性制造体系的基因。
