
























在精密制造、电子装配、生物医药等小负载场景中,电动机械夹爪的选型直接影响作业效率与产品质量。如何根据工件特性、工艺需求及环境条件,选择适配性高、性能稳定的夹爪类型?本文将从场景痛点出发,解析不同夹爪的技术特性,提供系统化选型方案。
一、小负载场景的核心需求:精度、柔性与洁净度
小负载场景的典型特征是工件重量轻、尺寸小、表面敏感度高,对夹爪的定位精度、夹持力控制及环境适应性提出严苛要求。例如,在半导体晶圆搬运中,夹爪需实现微米级定位与毫牛级力控,避免划伤镀金层;在生物样本操作中,夹爪需具备柔性抓取能力,适应不同形状的容器;在食品包装环节,电动夹爪需满足洁净室标准,避免油污污染。
核心矛盾:传统夹爪难以兼顾高精度、柔性与洁净度,导致工件损伤率高、生产效率低。
二、主流电动夹爪类型解析:结构决定性能
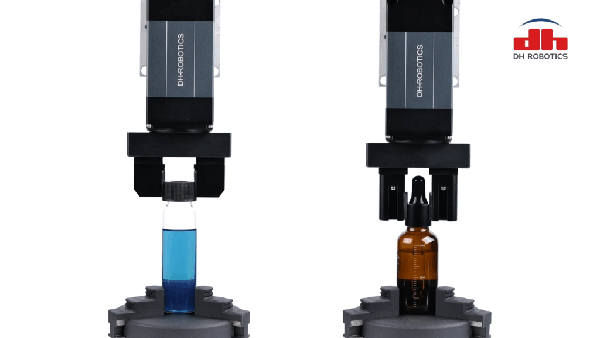
1. 平行开合型:精密制造的“标尺”
基于双导轨-滚珠丝杆传动系统,通过伺服电机驱动丝杆旋转,带动两侧滑块同步反向运动。其核心优势在于开合轨迹严格平行,夹持力分布均匀,重复定位精度可达亚毫米级,闭环控制下可实现毫牛级力控。典型应用包括电子元件插装、光学器件装配等对位置精度要求极高的场景。
适用场景:规则形状工件(如方块、圆柱)的精密抓取。
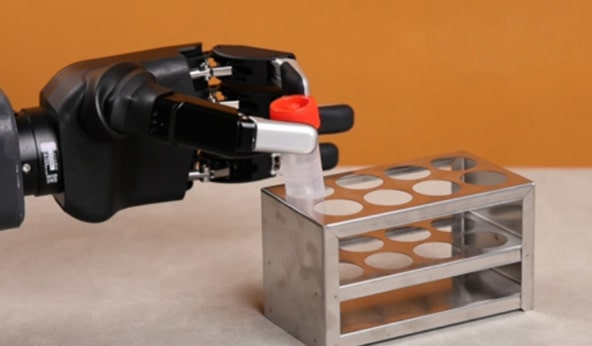
2. 柔性自适应型:异形工件的“解困者”
采用弹性体材料或颗粒气囊作为夹持界面,通过电机控制内部气压或变形量实现柔性抓取。其突破性价值在于解决异形、易碎物品的自动化难题,可适应多种尺寸范围内的尺寸变化,避免因固定行程导致的接触应力集中。例如,在生物样本操作中,柔性夹爪可自动贴合试管表面,实现无损抓取。
适用场景:曲面壳体、不规则管材等异形工件的柔性抓取。
3. 螺旋丝杆型:长时间夹持的“稳定器”
采用梯形丝杆或行星滚柱丝杆作为传动元件,电机扭矩通过丝杆螺母副转化为直线运动。其自锁特性可保持夹持状态无需持续供电,适合需要长时间保持夹持力的场景。在食品包装环节,螺旋丝杆型夹爪可避免油污污染,满足洁净室标准。
适用场景:需长时间稳定夹持的工件(如重型板材、大型结构件)。
三、选型方法论:场景-参数-成本的动态匹配
1. 评估工件特性
形状与尺寸:规则工件优先平行开合型,异形工件选择柔性自适应型。
表面敏感度:易损表面需配备柔性指端(如硅胶、橡胶),避免硬质材料划伤。
重量范围:小负载场景需控制夹爪自重,避免因惯性导致定位偏差。
2. 明确工艺需求
精度要求:精密装配需选择重复定位精度高的夹爪(如平行开合型)。
速度需求:高速分拣场景需优化夹爪行程与响应速度的协同性。
环境适应性:潮湿环境需选择IP防护等级高的夹爪,腐蚀性环境需采用不锈钢材质。
3. 平衡成本与性能
初期投资:柔性自适应型夹爪成本较高,但可减少产线换型时间。
维护成本:螺旋丝杆型夹爪传动效率较低,但自锁特性可降低能耗。
扩展性:模块化设计的夹爪可通过更换指端适应多品种生产需求。
四、未来趋势:智能化与模块化驱动产业升级
随着智能感知技术的融入,电动夹爪正从被动执行器向主动适应型智能末端演进。例如,通过集成视觉识别系统,夹爪可自主识别工件形状并调整抓取策略;通过边缘计算能力,夹爪可实时优化夹持力,适应动态负载变化。此外,模块化设计将成为主流,通过快换接口实现不同夹爪头的即插即用,进一步提升产线柔性。
总结
小负载场景的电动夹爪选型需聚焦精度、柔性与洁净度三大核心需求,通过评估工件特性、工艺需求及环境条件,选择适配性高的夹爪类型。平行开合型适合精密制造,柔性自适应型突破异形抓取极限,螺旋丝杆型强化长时间夹持稳定性。未来,随着智能化与模块化技术的普及,电动夹爪将进一步拓展应用边界,为工业自动化提供更高效的解决方案。

问答列表
Q1:小负载场景中,如何避免夹爪划伤工件表面?
A:选择柔性指端材料(如硅胶、橡胶),并配备压力闭环控制系统,实现恒定夹持力输出。
Q2:异形工件抓取时,哪种夹爪类型适应性最强?
A:柔性自适应型夹爪通过弹性体材料或颗粒气囊界面,可自动贴合工件表面,适应多种形状变化。
Q3:长时间夹持场景中,如何降低能耗?
A:选择具备自锁特性的螺旋丝杆型夹爪,无需持续供电即可保持夹持状态。
Q4:高速分拣场景中,夹爪行程与响应速度如何协同优化?
A:通过缩短闭合行程,配合高扭矩电机与低摩擦传动机构,将单次抓放周期压缩至合理范围。
Q5:潮湿环境中,电动夹爪需满足哪些防护要求?
A:选择IP防护等级高的夹爪(如IP67及以上),并采用不锈钢材质或特殊涂层,延长使用寿命。
