
























你是否曾为机器人抓取不同物体而烦恼?传统夹具需要精确编程,面对形状多变、材质各异的物品时,要么夹不稳,要么用力过猛造成损坏。
自适应夹爪的出现,正是为了解决这个核心痛点。它具备灵活适应能力,无需针对每个新物体进行精确编程,就能实现可靠且安全的抓取操作。
一、自适应夹爪的核心挑战:感知未知物体
面对不确定的抓取任务,传统的刚性夹爪程序固定,缺乏感知能力,常引发两大问题:
抓取失效:对光滑、柔软或不规则物体,传统夹具极易打滑或定位偏移。
物体损伤:易碎或精密部件在刚性抓取中承受过大压力,极易损坏。
自适应夹爪的核心优势在于其内置的“感知-决策”系统。
它能主动感知物体特性,实时决策并调整夹持动作,如同为机械手赋予了触觉与初步判断力。
二、感知之眼:传感器如何探测物体特性
自适应夹爪的智能始于其搭载的感知系统。多种传感器协同工作,充当夹爪的“眼睛”和“皮肤”:
力传感器:夹爪指尖或关节处集成微型力传感器(如应变计)。
工作原理:当电动夹爪接触物体时,这些传感器实时测量接触点的压力分布和微小形变。
作用:将物理接触转化为精确的电子信号,初步判断物体软硬及所需力度下限。
视觉传感器:部分自适应夹爪整合2D/3D相机。
工作原理:相机捕捉物体图像,生成点云数据。
作用:快速识别物体轮廓、尺寸大小和空间姿态,为夹爪规划接近路径和初始开合度。
传感器网络构建了物体完整的物理画像:材质软硬、几何尺寸、表面特性及空间姿态。这些实时数据流是后续智能决策的唯一依据。
三、智慧大脑:智能算法的动态决策与调节
传感器采集的原始数据必须转化为精确的夹持指令。这一重任落在自适应夹爪的智能算法上:
1.数据融合与特征提取:
算法实时接收来自力传感器、视觉传感器等的多维数据流。
通过滤波、配准等技术消除噪声干扰,提取关键特征:物体尺寸、估算重量、材质特性(刚性/柔性/易碎)、表面摩擦系数。
2.夹持策略生成:
基于特征识别,算法从预置库中匹配或实时生成最优抓取点。
结合物体属性和任务目标,计算出理论上安全且稳固所需的最小夹持力范围。
3.动态闭环控制:
初始夹持:夹爪以保守力度接触物体。
实时反馈:力传感器持续监测实际接触力。
动态调整:算法不断对比实际力与目标力范围:
若检测到打滑趋势(力减小),立即微增夹持力。
若物体形变过大或接触力接近安全阈值,瞬间减小力度。
整个过程在毫秒级内动态循环,确保力度始终保持在安全有效区间。
智能算法的核心在于其精准建模与超快响应速度。
它能在接触瞬间理解物体特性,并在数十毫秒内完成多次力度调整,最终达到既夹得稳又不压坏的微妙平衡。
四、协作效能:感知与决策的完美闭环
自适应夹爪的卓越性能源于传感器与智能算法构成的紧密协作体系:
1.传感器实时感知:精准采集物体特性与环境状态。
2.算法瞬间决策:分析数据并计算出最优夹持策略及动态调整指令。
3.执行器精准响应:驱动机构(如电机、气囊)依据指令快速调整夹持姿态和力度。
4.闭环实时反馈:传感器持续监控执行效果,新数据再次输入算法进行优化。
这个“感知-决策-执行-反馈”的高频闭环,使自适应夹爪具备了近似人手般的灵活适应性与控制精度。
五、柔性抓取的未来已来
传感器与智能算法的融合赋予了自适应夹爪独特价值:
提升效率:减少夹具更换与繁琐编程,快速切换抓取任务。
增强柔性:轻松应对小批量、多品种的柔性生产需求。
保障安全:动态力度控制有效保护易损工件和昂贵设备。
拓展边界:抓取传统夹具难以处理的复杂、不规则或柔软物体。
自适应夹爪技术正成为柔性自动化不可或缺的基石。
六、自适应夹爪品牌型号推荐
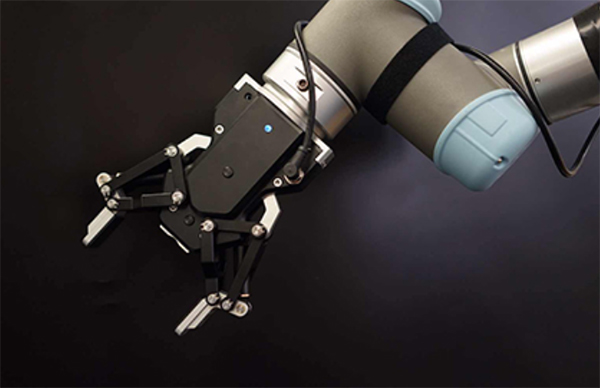
大寰AG 系列关节型自适应电爪,适用于协作机器人,以精巧的结构设计适配对不同形状工件的稳定抓取。以优异的产品设计,AG系列分别荣获2019年和2020年红点设计奖。夹爪连杆机构支持包络自适应抓取,更适应圆形、球形或异形物体,提高抓取稳定性。

总结:
随着传感技术更微型化、算法更强大、执行机构更高效,自适应夹爪将在更多领域展现价值:医疗康复辅助、精密器件装配、生鲜物流分拣等复杂场景将越来越多地出现它们的身影。
未来工厂追求大规模个性化定制,产线上产品种类更多、批次更小、切换更快。自适应夹爪无需重新调试即可抓取不同零件的特性,已成为柔性生产线上不可或缺的“多面手”。
