
























在汽车零部件混线生产场景中,传统刚性夹爪因无法适应多品种、小批量需求,导致产线换型时间长达20分钟,设备综合效率(OEE)不足65%。更严峻的是,在3C电子元件抓取环节,刚性夹爪因力控精度不足,造成芯片表面划伤率高达12%,直接推高制造成本。这些痛点暴露了传统工业夹具在复杂工况下的局限性——刚性结构难以兼容多样化需求,预设参数模式无法应对动态环境变化。
技术突破的三重路径:从材料到智能的进化
1. 材料科学重构物理基础
柔性夹爪的核心突破始于材料创新。采用硅橡胶与热塑性聚氨酯复合的弹性体,通过分子链结构设计实现100%以上的应变能力,配合内部微型气腔结构,形成“肌肉-骨骼”仿生系统。这种材料组合使电动夹爪在抓取曲面物体时,接触面积较刚性夹爪提升3-5倍,局部压强降低70%,有效解决易碎品抓取难题。
2. 智能感知构建闭环控制
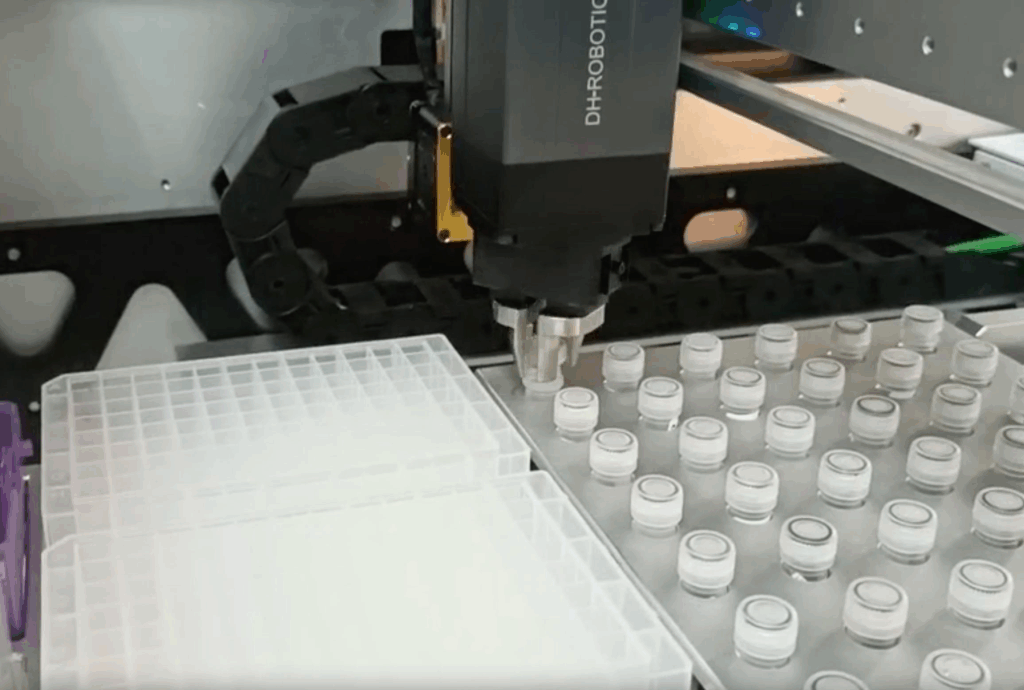
集成力传感器与视觉系统的柔性夹爪,通过实时采集抓取过程中的应力分布数据,结合机器学习算法动态调整气压参数。在医疗样本搬运场景中,该系统将重复定位精度控制在0.05mm以内,使细胞悬液样本的污染率从0.3%降至0.01%。更先进的触觉反馈技术,通过检测物体表面微变形量(0.1mm级),实现抓取力的纳米级调节。
3. 模块化设计提升经济性
可更换指尖模块的设计理念,使单一夹爪本体能适配从0.1kg到50kg的负载范围。在物流分拣中心,通过更换不同摩擦系数的指面材料,柔性夹爪可同时处理纸箱、编织袋及反光膜包裹,分拣效率达60件/分钟,较人工操作提升300%。这种设计使设备投资回报周期缩短至18个月。
应用场景的跨界拓展:从工厂到社会的价值延伸
1. 精密制造的“微米革命”
在半导体封装领域,柔性夹爪通过0.01mm级定位精度,解决IC芯片的精准放置难题。其非标定制的吸盘结构,可同时处理0201规格元件与大型连接器,使产品不良率从0.8%降至0.15%。在光学镜片组装中,真空吸附与机械夹持的复合设计,将镜片破损率控制在0.3%以内。
2. 柔性生产的“秒级切换”
汽车制造企业通过部署柔性夹爪系统,实现变速器壳体等复杂曲面的自动抓取。视觉引导系统可在0.8秒内识别抓取点,适应±5°的安装角度偏差,使多车型混线生产的换型时间缩短70%。这种能力使产线能灵活应对市场波动,库存周转率提升40%。
3. 社会服务的“无界触达”
在医疗领域,柔性夹爪通过医用级材料与全封闭设计,满足ISO 5级洁净室标准。其疏水疏油表面处理技术,使器械抓取后的消毒效率提升50%。在食品行业,FDA认证的硅胶指面在搬运烘焙制品时,通过压力分布传感系统自动识别酥皮脆性,将破损率控制在0.3%以内。

未来发展的四大趋势:从工具到生态的跃迁
多模态驱动技术融合:气压、液压与形状记忆合金的复合驱动系统,将负载范围扩展至百公斤级,同时保持微米级控制精度。
极端环境适配:耐高温陶瓷基复合材料与耐低温弹性体的研发,使夹爪能在-20℃至200℃环境中稳定工作,满足半导体制造等特殊需求。
自主决策系统:基于数字孪生技术的虚拟调试平台,使夹爪能通过5G网络实时获取生产线数据,自主优化抓取策略,响应速度突破毫秒级。
绿色制造体系:可降解生物基材料与低能耗驱动系统的应用,使单次操作能耗降低至传统设备的60%,符合ESG发展要求。
问答列表
Q1:柔性夹爪如何解决异形物体抓取难题?
A:通过弹性体材料的非线性形变特性,结合气压驱动的腔室结构,实现包络式抓取。接触面积较刚性夹爪提升3-5倍,局部压强降低70%。
Q2:柔性夹爪的精度能达到什么水平?
A:在医疗样本搬运场景中,重复定位精度可达0.05mm;在半导体封装领域,定位精度达0.01mm级。
Q3:柔性夹爪适用于哪些极端环境?
A:通过耐高温陶瓷基复合材料与耐低温弹性体,可在-20℃至200℃环境中稳定工作;电磁屏蔽设计使其能在强干扰环境下运行。
Q4:柔性夹爪如何降低使用成本?
A:模块化设计使单一夹爪本体能适配多种负载需求,维护成本降低40%;规模化生产使材料采购成本下降30%。
Q5:柔性夹爪的未来发展方向是什么?
A:将向多模态驱动融合、自主决策系统、绿色制造体系方向发展,实现从工具到生态的全面升级。
本文总结
机器人柔性夹爪通过材料科学、智能感知与模块化设计的协同创新,正在重构工业抓取的技术逻辑。其价值不仅体现在解决刚性夹爪的痛点,更在于推动制造业向柔性化、智能化、绿色化转型。随着多模态驱动、自主决策等技术的突破,柔性夹爪将成为连接物理世界与数字世界的核心接口,为工业4.0提供关键基础设施。
