
























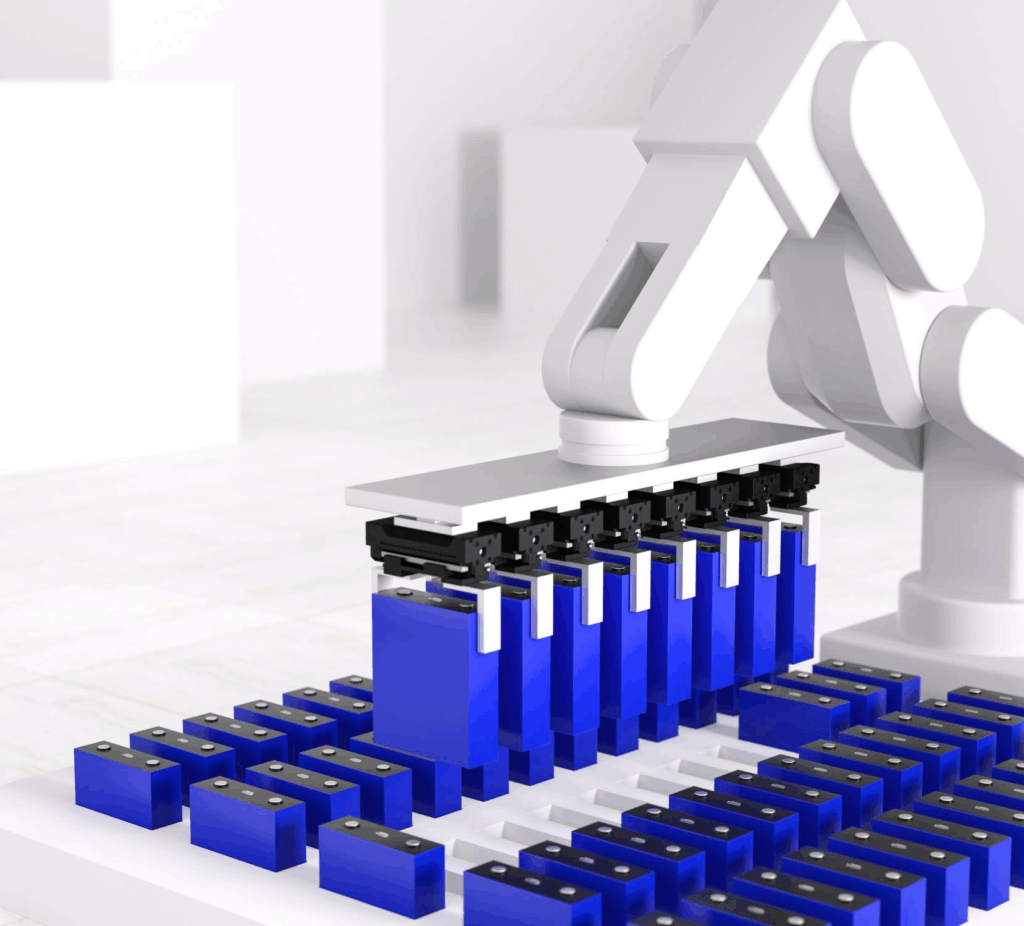
在智能制造浪潮中,机器手夹爪作为工业机器人的“末端执行器”,其性能直接决定了自动化系统的效率与适应性。传统刚性夹爪因缺乏柔性感知与自适应能力,难以应对异形工件、易损物料及复杂环境的抓取需求。如何突破物理局限,实现“一爪多用”的柔性抓取,成为工业自动化领域的关键命题。
技术瓶颈:传统夹爪的三大短板
1. 精度与柔性的矛盾
传统气动夹爪的重复定位误差普遍超过±0.1mm,难以满足精密装配需求。例如,在微型电机生产中,0.8mm直径线圈的自动绕线作业因定位偏差导致线圈变形率高达15%,而人工操作变形率仅3%。
2. 场景适配性不足
单一夹持模式无法适应异形工件,更换夹具需停机调整,导致生产效率下降。某汽车电子制造商曾因夹爪规格不适配,在装配检测探头时频繁更换工具,单次换型耗时2小时,年维护成本增加数十万元。
3. 感知能力缺失
缺乏力反馈系统的传统夹爪在搬运光学镜片时,易因微应力导致检测数据偏差。某半导体企业因夹爪力控精度不足,芯片搬运破损率达8%,直接影响产品良率。
未来创新方向:四大技术突破点
1. 智能化升级:从“机械执行”到“自主决策”
力觉感知革命:集成多维力传感器与卡尔曼滤波算法,将力觉信息分辨率提升至0.1N。例如,在航空叶片搬运中,仿生夹爪通过压力分布算法,使曲面抓取成功率提升至99.7%。
AI驱动自适应:引入深度学习算法,实现机器手夹爪对未知物体的自主识别与抓取策略优化。某实验室测试显示,AI夹爪在处理不规则金属件时,破损率从8%降至0.3%。
视觉-力觉融合:结合高分辨率相机与3D点云算法,实现毫米级定位精度。在半导体封装领域,视觉引导夹爪可将芯片安装误差控制在±0.02mm以内。
2. 柔性化设计:从“刚性结构”到“仿生适应”
材料科学突破:采用热塑性弹性体与硅基复合材料,提升夹爪耐高温性与抗疲劳性。某柔性夹爪在百万次循环测试中,性能保持率超90%。
气动柔性结构:通过独立气室控制与纤维限位层设计,实现“S”形弯曲与扭转运动。在食品加工领域,柔性夹爪可同时抓取0201规格元件与大型连接器,复合抓取效率提升40%。
模块化重构:采用三指可重构构型,降低机构复杂度。某多指灵巧手通过模块化设计,实现捏、握、抱等动作,抓取范围覆盖几毫米至二百毫米。
3. 精密化控制:从“毫米级”到“亚毫米级”
闭环控制系统:永磁同步电机与行星减速器协同,将旋转精度控制在0.01°。在光学镜片检测中,力控精度达0.1N级,确保检测数据重复性误差±0.5%以内。
无油润滑设计:消除传统气动系统的油雾污染,使洁净室颗粒物浓度从Class 1000降至Class 100,产品缺陷率下降。
4. 跨领域融合:从“单一功能”到“系统集成”
物联网协同:通过IO通讯、脉冲+方向控制等技术,直接适配主流协作机器人协议。某夹爪将集成时间从15天缩短至7天,效率提升50%。
人机协作安全:采用轻质碳纤维材料与碰撞检测算法,降低人机交互风险。在康复医疗领域,柔性夹爪可辅助患者进行手部功能训练,运动精度达0.1mm。

未来应用场景:三大领域实践突破
1. 精密制造:突破尺寸极限
在微型电机生产中,电动夹爪配合视觉系统,实现0.8mm线圈的自动绕线,人工变形率从15%降至0.5%。
2. 异形搬运:从“刚性夹持”到“柔性包裹”
针对航空叶片曲面特征,仿生夹爪通过柔性指垫与压力算法,使搬运成功率提升至99.7%。
3. 洁净生产:从“油雾污染”到“无尘操作”
无油润滑夹爪在半导体封装中,将颗粒物浓度控制在Class 100以内,产品良率提升12%。
问答环节
Q1:电动夹爪与传统气动夹爪的核心区别是什么?
A:电动夹爪通过电机驱动实现闭环控制,具备毫米级定位精度与力反馈能力;气动夹爪依赖压缩空气,定位误差较大且缺乏柔性感知。
Q2:柔性夹爪如何适应高温环境?
A:采用耐高温电机与隔热材料,部分型号可在200℃环境下稳定工作,但需根据工况选型。
Q3:夹爪的智能化体现在哪些方面?
A:主要体现在力觉感知升级、AI自主决策、视觉-力觉融合及跨系统协同能力。
Q4:多指灵巧手为何是未来趋势?
A:多指灵巧手拥有更多自由度,可完成捏、夹、握等多样化操作,通用性极强,能适应复杂环境。
Q5:夹爪技术如何推动智能工厂建设?
A:通过柔性化设计、精密化控制与跨领域融合,实现生产线的快速换型、无损操作及人机协作,提升整体效率。
本文总结
机器手夹爪技术正从“刚性执行”向“柔性智能”转型,其创新方向聚焦于力觉感知升级、仿生结构设计、模块化系统集成及跨领域技术融合。未来,随着AI与物联网技术的深度应用,夹爪将成为智能工厂中不可或缺的“数字手指”,持续释放工业机器人的潜在价值,推动制造业向柔性化、智能化方向迈进。
