
























在工业自动化领域,抓取技术经历了从机械夹爪到气动夹爪,再到柔性夹爪的三次迭代。传统刚性夹爪因结构固定,难以适应异形、易损或微小物体的抓取需求;气动夹爪虽提升了响应速度,却因力控精度不足导致高破损率。而柔性夹爪的模块化设计,通过结构可变形、驱动可调节、传感可反馈的三大核心特性,正在重塑工业抓取的技术范式。
一、模块化设计:柔性夹爪的“乐高式”创新
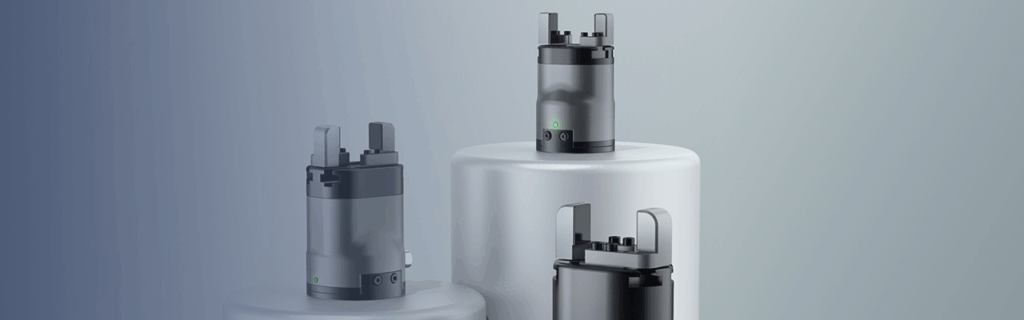
1.1 结构模块化:从“单一工具”到“万能抓手”
柔性夹爪的结构设计采用“基础骨架+可替换指尖”模式。基础骨架由多层弹性体构成,通过仿生学原理模拟肌肉组织的形变能力,可实现毫米级弯曲与拉伸。指尖模块则根据应用场景定制,例如医疗领域采用生物兼容性硅胶,食品行业使用耐腐蚀聚合物,汽车制造配备高耐磨金属骨架。这种设计使单一夹爪适配从0.5mm的微型芯片到150mm的汽车轴承,覆盖90%以上的工业抓取需求。
1.2 驱动模块化:气压、电动与混合动力的“三重奏”
驱动系统的模块化设计突破了传统夹爪的单一动力模式。气压驱动以微米级精度控制形变,适用于3C电子精密装配;电动驱动提供高扭矩输出,满足汽车零部件的重载抓取;混合驱动系统则通过压力传感器实时切换动力模式,在物流仓储场景中实现“刚柔并济”的抓取效果。例如,某物流中心采用混合驱动柔性夹爪后,对200种不同包装盒的抓取成功率从65%提升至98%。
1.3 传感模块化:从“被动执行”到“主动感知”
柔性夹爪的传感系统集成了压力、触觉、视觉三重反馈机制。压力传感器阵列以0.1N的精度监测接触力,避免对生物样本或精密器件造成损伤;触觉传感器通过分布式感知网络,实时反馈物体表面纹理,调整抓取策略;视觉传感器则与AI算法结合,实现异形物体的自主识别与定位。在医疗场景中,这种多模态传感使样本转运的破损率从12%降至0.3%。
二、多样化场景:柔性夹爪的“破圈”实践
2.1 医疗领域:无菌环境中的“隐形手术刀”
在分子诊断实验室,柔性夹爪通过集成光学识别系统,实现微量样本的精准定位与转移。其防静电设计与HEPA过滤系统配合,将环境微粒控制在ISO Class 5标准内。在细胞培养操作中,柔性夹爪完成对3D生物打印结构的无损转移,保持细胞活性达95%以上。重症监护病房内,模块化设计的夹爪可15分钟内完成整机灭菌,降低交叉感染风险。
2.2 3C电子:精密装配的“微米级操盘手”
在手机中框组装环节,柔性夹爪通过微米级定位精度,实现摄像头模组、指纹识别芯片等脆弱元件的精准放置,将组装良率从92%提升至99%。其防静电涂层与无尘设计,满足电子制造的洁净度要求。在测试环节,夹爪的力控系统可模拟人手操作,完成按键压力测试与接口插拔,替代传统人工检测。
2.3 物流仓储:多品类分拣的“万能适配器”
针对尺寸、材质各异的包装,柔性夹爪通过自适应形变与气压调节,实现“以不变应万变”的分拣效果。在某电商仓库中,夹爪可同时抓取纸箱、塑料袋、金属罐等不同材质,完成喷标打码、分拣装盒等工序,将分拣效率提升3倍。其长行程设计(最大开合行程120mm)适配从纽扣电池到家电包装的抓取需求,减少夹具更换频率。
三、问答:关于柔性夹爪的深度探讨
Q1:柔性夹爪的模块化设计如何降低维护成本?
A:模块化设计使故障定位更精准,例如驱动单元故障时,仅需更换气压阀或电机模块,无需整体拆卸夹爪。指尖模块的标准化接口支持快速更换,维护时间从2小时缩短至15分钟。
Q2:柔性夹爪能否适应高温或腐蚀性环境?
A:通过材料创新,部分柔性夹爪采用耐高温硅胶或特殊合金骨架,可在200℃以下环境稳定工作。表面涂层技术则提升抗腐蚀性,满足化工、冶金等行业的严苛要求。
Q3:柔性夹爪的力控精度如何保障?
A:分布式压力传感器阵列与闭环控制算法结合,实现0.1N级的力控精度。在医疗样本搬运中,系统可将夹持力精确控制在±0.01N范围内,避免机械损伤。
Q4:柔性夹爪是否支持二次开发?
A:多数柔性夹爪提供开放式API接口,支持与ROS、PLC等工业系统集成。用户可通过可视化编程界面调整抓取策略,无需深厚编程基础。
Q5:柔性夹爪的寿命如何评估?
A:核心弹性体材料的疲劳测试显示,其寿命可达300万次抓取循环。模块化设计使易损件(如指尖)可单独更换,进一步延长整体使用寿命。

本文总结
柔性夹爪的模块化设计通过结构、驱动、传感系统的灵活组合,突破了传统刚性夹爪的应用局限。其在医疗无菌操作、3C电子精密装配、物流仓储等场景中的实践,验证了“以柔化刚”技术路线的可行性。随着材料科学、AI算法与模块化设计的持续突破,柔性夹爪正成为推动智能制造升级的核心基础设施,为工业自动化注入“柔性智能”的新动能。
