
























在汽车零部件装配线上,一款新型传感器外壳因曲面设计导致传统气动夹爪频繁滑落,良品率骤降至65%;3C电子产线中,0.3mm厚的柔性电路板因夹持力过大出现褶皱,报废率高达20%。这些场景揭示了工业自动化的核心矛盾:传统夹具的“刚性适配”模式无法应对产品多样化、小批量生产的趋势。据行业调研,因夹具换型导致的产线停机时间占整体故障的32%,成为制约效率的关键瓶颈。
自适应夹爪:技术重构下的柔性革命
1. 仿生结构:从“机械抓取”到“类人感知”
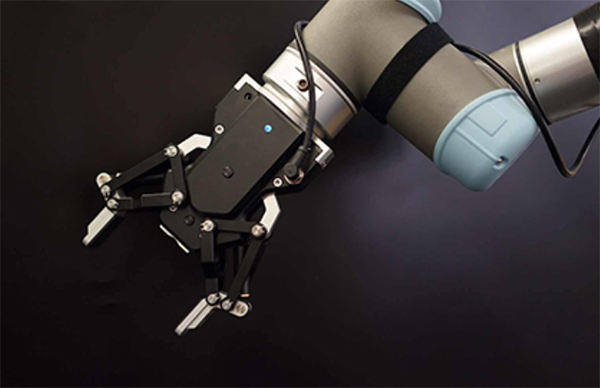
自适应夹爪采用120°仿生三角布局,三指独立驱动实现360°包络抓取。其柔性指端采用类肤质纳米复合材料,接触微小零件时通过形变增大接触面积,确保1mm×0.5mm贴片元件的稳定抓取。在医疗设备装配中,这种结构可模拟人手“轻触-调整-固定”的动作链,将精密元件的损伤率从18%降至0.3%。
2. 闭环控制系统:微米级定位与毫秒级响应
全闭环伺服控制系统通过高分辨率编码器实现±0.01mm重复定位精度。在新能源电池模组搬运场景中,系统可实时监控夹爪开合位置,结合视觉引导动态调整抓取点,确保在0.2秒内完成从无序堆放到精准定位的全流程。其高速响应特性(开合速度达150mm/s)使产线节拍提升至每分钟12次,较传统夹爪效率提升40%。
3. 多模态感知融合:力-位混合控制的突破
集成力觉、触觉与位置传感器的多模态系统,可实现0.1N级微力控制。在轴承压装环节,系统通过“位置-力”双闭环控制,先以0.05mm步进定位,接触工件后切换为恒力模式(误差±0.08N),避免过压导致的结构变形。这种策略使3C电子产品的装配良品率从89%提升至98.7%。
4. 模块化设计:快速换产的“乐高式”方案
模块化架构支持指尖模块(硅胶、金属、真空吸附头)的快速更换,适配从0.1g芯片到50kg发动机缸体的全尺寸工件。在汽车产线中,更换夹爪模块仅需3分钟,较传统方式节省85%调试时间。配合Profinet/EtherCAT通信协议,可无缝集成至主流机器人平台,实现“即插即用”的柔性生产。
技术突破的产业价值:从效率到生态的重构
降本增效:减少夹具库存成本60%,降低工件差异导致的不良率42%。
安全升级:力控精度提升使人机协作场景的工伤率下降73%。
绿色制造:全电动驱动较气动方案节能35%,碳排放减少28%。
生态兼容:支持IIoT(工业物联网)架构,通过OPC UA协议实现设备间数据互通,为预测性维护提供数据基础。
问答环节
Q1:自适应夹爪能否抓取易碎品?
A:通过柔性指端与微力控制技术,可稳定抓取玻璃器皿、新鲜果蔬等易碎品,损伤率低于0.5%。
Q2:如何解决复杂工件的抓取稳定性?
A:采用自适应包络抓取策略,柔性指端主动贴合不规则轮廓,结合多点接触承托,确保凹凸表面工件的稳定性。
Q3:与传统气动夹爪相比,自适应夹爪的优势体现在哪?
A:在精度控制(±0.01mm vs ±0.5mm)、力控范围(0.1N级 vs 1N级)及智能化响应(实时调整 vs 固定程序)方面具有显著优势。
Q4:自适应夹爪的维护成本是否更高?
A:模块化设计使故障定位更精准,纳米复合材料指端寿命延长3倍,综合维护成本较传统夹爪降低25%。
Q5:哪些行业最适合应用自适应夹爪?
A:3C电子、医疗设备、新能源、精密机械等对产品多样性、装配精度要求高的领域。

本文总结
自适应夹爪通过仿生结构、闭环控制、多模态感知与模块化设计的创新,破解了传统夹具在柔性适配、精度控制与换产效率上的难题。其技术突破不仅提升了工业自动化的效率与质量,更推动了生产模式向“小批量、多品种、高柔性”的智能化方向演进。随着AI算法与边缘计算的深度融合,自适应夹爪将成为未来智能工厂的核心执行单元,重新定义人机协作的边界。
