
























在精密制造领域,传统抓取工具正面临严峻挑战:3C电子元件尺寸持续微缩,汽车零部件装配精度要求飙升,医药食品行业对洁净度与无损搬运的需求日益严苛。电动机械夹爪凭借其电力驱动、智能控制与柔性适配特性,成为破解这些行业痛点的关键工具。本文将深度解析其在三大领域的典型应用场景与核心工艺要点。

一、3C电子:毫米级精度下的“微操大师”
痛点:微型化与高集成度的双重挤压
智能手机摄像头模组、微型传感器等核心部件的尺寸已突破物理极限,传统夹爪因体积过大、控制精度不足,导致元件损坏率居高不下。某头部手机厂商曾因气动夹爪气压波动,造成摄像头模组良品率下降。
解决方案:柔性控制与视觉协同
电动机械夹爪通过以下技术突破实现精密操作:
多模态驱动:采用微型伺服电机与谐波减速器组合,实现亚毫米级重复定位精度。在芯片贴装环节,夹爪可精准控制夹持力,避免金线断裂。
力位闭环控制:集成力传感器与位置编码器,实时监测夹持状态。例如,在屏幕贴合工序中,夹爪能根据玻璃材质自动调整压力,防止压痕或碎裂。
视觉引导系统:部分高端型号配备微米级视觉定位模块,可识别微型元件的焊点位置,引导夹爪完成高精度插装。
典型场景
摄像头模组组装:通过旋转夹爪实现镜头与图像传感器的多角度对接。
FPC柔性电路板搬运:采用平行开合型夹爪,避免电路板因受力不均而变形。
主板检测环节:夹爪夹持主板进行平移,配合视觉系统调整位置,确保连接器精准对接。

二、汽车零部件:重载与柔性的完美平衡
痛点:大型化与精密化的矛盾
发动机缸体、轴承等部件既需承受数百公斤重量,又要求装配误差控制在极小范围内。传统夹爪难以同时满足高负载与高精度需求。
解决方案:力放大与自适应控制
电动机械夹爪通过以下设计实现重载场景的精密操作:
连杆增力机构:采用曲柄连杆结构,将电机输出扭矩转化为数倍夹持力。在螺栓拧紧环节,夹爪可稳定夹持重型部件,配合机械臂完成高精度操作。
动态力控技术:通过实时监测夹持力,自动调整电机参数。例如,在搬运铝合金轮毂时,夹爪能根据表面涂层硬度动态调节压力,避免划伤。
模块化设计:支持快速更换指部,适应不同形状零部件。在变速器装配线中,同一套夹爪可完成齿轮、轴套等多类零件的抓取。
典型场景
发动机缸体装配:夹爪将部件旋转至预设角度,配合机械臂完成精密对接。
车身焊接环节:通过防滑纹理指面稳定夹持钣金件,防止焊接过程中移位。
零部件检测工位:夹爪夹持部件进行多角度翻转,便于视觉系统全面检测表面缺陷。
三、医药食品:洁净与柔性的双重守护
痛点:无损搬运与卫生标准的严苛要求
药品分拣、生物样本操作等场景对夹爪的洁净度、柔顺性提出极高挑战。传统气动夹爪因油污污染风险,已被多家药企列入禁用清单。
解决方案:全电力驱动与柔性材质
电动机械夹爪通过以下特性满足行业需求:
无油污设计:完全依赖电力驱动,杜绝压缩空气系统可能引入的油雾、粉尘污染。在药品分拣线中,夹爪可直接接触药瓶表面,符合相关标准。
柔性自适应夹持:采用硅胶、弹性体等材质作为夹持界面,通过电机控制变形量实现无损抓取。在巧克力分拣场景中,夹爪能自动贴合不同形状的巧克力,避免破损。
密封防护结构:部分型号配备防护等级外壳,可承受高压清洗,满足食品行业卫生要求。在烘焙设备中,夹爪能稳定抓取刚出炉的面包,防止表面塌陷。
典型场景
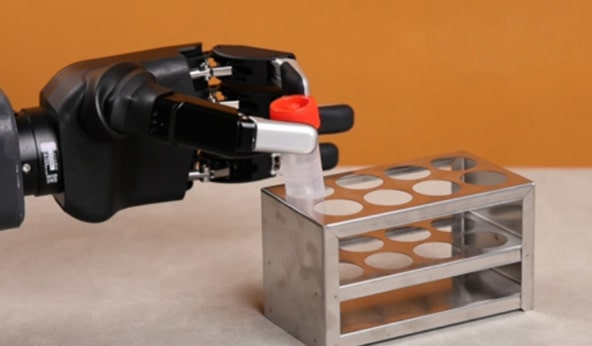
试管分拣:夹爪通过微力控技术抓取装载生物样本的试管,避免液体溅洒。
药品包装环节:夹爪根据药盒尺寸自动调整开合范围,实现高效码垛。
果蔬采摘:柔性指面模拟人手触感,减少对表皮的损伤。
总结:电动机械夹爪的未来图景
从3C电子的毫米级微操,到汽车零部件的重载精密装配,再到医药食品的无损洁净搬运,电动机械夹爪正通过电力驱动、智能控制与柔性适配技术,重新定义工业抓取的边界。随着多模态传感器、边缘计算等技术的融合,未来的夹爪将具备自主决策能力,成为智能工厂中不可或缺的“工业手指”。
行业问答
Q1:电动机械夹爪能否抓取液体或半流体食品?
A:需选择配备真空吸附模块的专用型号,通过负压吸附实现稳定抓取,避免液体泄漏。
Q2:在高温环境下,电动机械夹爪如何保证性能?
A:需采用耐温材料制成的夹爪,并优化电机散热设计,部分型号可通过强制风冷或液冷系统维持稳定运行。
Q3:电动机械夹爪的维护成本是否高于传统夹爪?
A:电动型号结构相对简单,核心部件为电机与传感器,故障时可通过故障代码快速定位问题,长期维护成本更低。
Q4:如何选择适合医药行业的电动机械夹爪?
A:需优先选择符合卫生标准的材质,配备压力闭环控制系统,并支持快速更换指部以适应不同容器形状。
Q5:电动机械夹爪能否替代人工完成复杂装配任务?
A:在标准化流程中,电动夹爪可通过编程实现高效操作,但涉及需要柔性触觉反馈的场景,仍需人机协作完成。
