
























近日,香港大学Omni-Mani团队联合暨南大学珠海校区在由珠海市人民政府主办、珠海市香洲区人民政府承办的“珠海国际灵巧操作挑战赛暨具身智能产业大会”上获得了“机器人杂乱线缆整理插拔任务”赛道一等奖。 Omni-Mani团队采用了大寰机器人自主研发的PGC-50-35协作型平行电爪,搭载于协作机器人末端,灵活、稳定地完成“机器人杂乱线缆整理插拔任务”。
Omni-Mani团队由香港大学计算机系副教授、逐际动力首席科学家潘佳指导,博士后研究员周鹏博士、齐佳明博士,以及在读博士生李仲萱等成员组成。据悉,潘佳副教授主要从事机器学习与机器人相关的研究。


可形变物体的精细操作
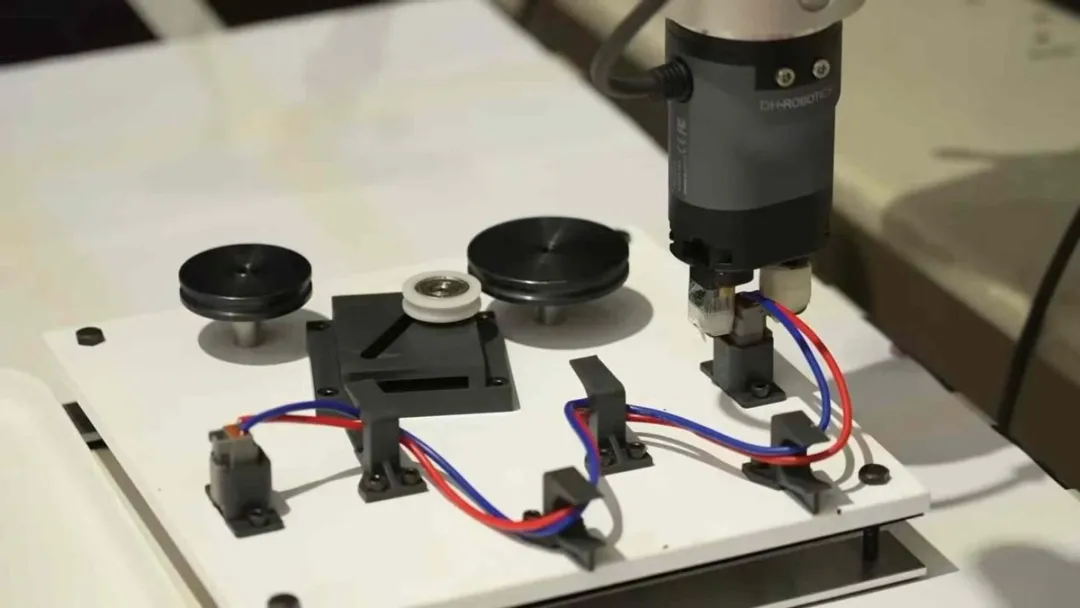
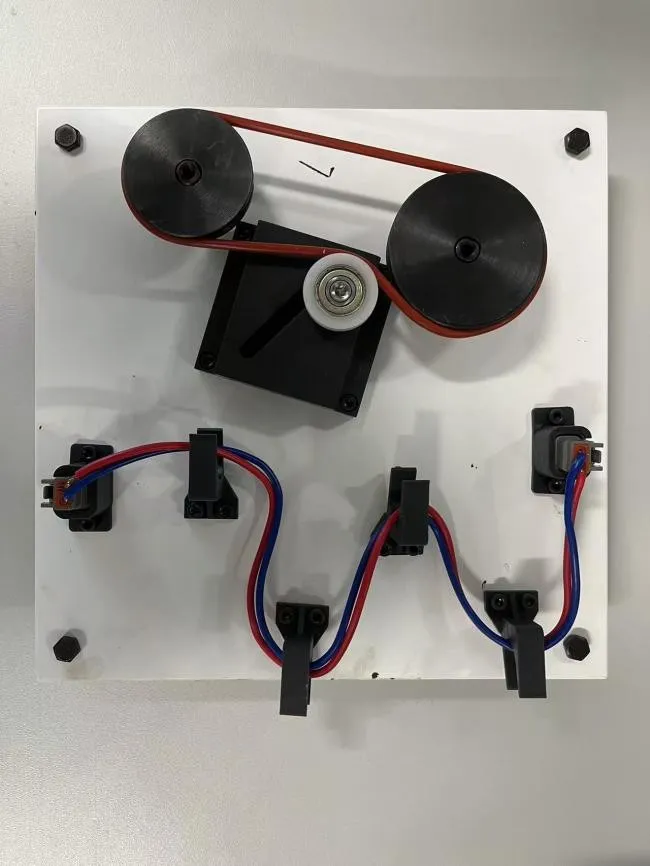
Omni-Mani团队介绍道,“机器人杂乱线缆整理插拔任务”有四大步骤:皮带安装、线缆安装、皮带拆除、线缆拆除,关键难点在于皮带和线缆等可形变物体的精细操作技术。
针对复杂的动力学模型,Omni-Mani团队在赛前主要使用遥操作对协作机器人成功执行任务的轨迹进行收集与分析。尽管实际比赛时会有细微的变动,但并不影响任务执行。
麻雀虽小五脏俱全
任务完成的背后,PGC-50-35协作型电爪发挥着重要作用。
PGC系列协作型电爪是大寰机器人推出的主要面向协作机器人应用的电动夹爪,支持市面上所有主流协作机器人品牌,系统内提供大寰插件,易于控制与编程。
Omni-Mani团队表示,采用大寰机器人的PGC-50-35产品,主要是出于匹配任务场景需求的考虑。
比赛任务场景中的操作板面积极小,仅有25cm*25cm。协作机器人要想在狭小空间内完成数次操作,必须搭载能够同时满足狭小空间要求,且稳定性和可靠性均较高的电动夹爪。
PGC-50-35则是一款全面符合Omni-Mani团队需求的产品。加上Omni-Mani团队编写的Python SDK的api库,更加便于比赛中的使用。
PGC-50-35采用集成化设计,“小巧玲珑”且可靠稳定。其体积仅为(124mm×63mm×63mm),自重仅有0.5kg;总行程为37mm,单侧加持力为15~50N,位置重复精度达到了±0.03mm。PGC-50-35通过了大量的客户现场实际应用考验,稳定性和可靠性得到高度认可。

图:大寰机器人 PGC-50-35
此外,2021年,PGC系列协作型平行电爪获得了红点奖与iF奖两项工业设计奖项。
写在最后
关于大寰机器人(DH-Robotics)
大寰机器人(DH-Robotics)成立于2016年,是一家专注于为智能制造场景提供核心零部件的国家级高新技术企业,总部位于中国深圳,在华东、华中、华北等区域均设有分公司,并设有海外运营中心,服务体系覆盖全球多个地区。
大寰机器人拥有伺服电动夹爪、音圈执行器、伺服电缸3大系列产品,200多款细分产品型号,并在2024年接连重磅发布了DH-5灵巧手和iFM 智能柔性运动系统等新系列产品。
服务终端客户超800家,足迹遍布全球30多个国家,凭借稳定的制造供应体系与完善的销售服务体系,大寰机器人实现了从产品端到终端的反馈闭环,得到市场的广泛认可,已成为国内工业智能制造核心零部件领军企业。
01.jpg)

