
























In order to create a human robot hand that can mimic the accuracy and dexterity of a human operator, we at DH-Robotics are continuously investigating the best mix of materials and actuators. Without sacrificing dependability or durability, our humanoid robot hand designs are designed to carry out challenging jobs, such as high-speed assembly and sensitive object handling. We make sure that our robotic hands satisfy the rigorous demands of industrial, collaborative, and research applications by carefully choosing high-performance components. Our human robot hand’s realistic movement, adaptability, and repeated accuracy are made possible by the interaction of sophisticated materials and accurate actuators.
Choosing Advanced Materials for Strength and Flexibility
The foundation of any humanoid robot hand lies in its materials. At DH-Robotics, we prioritize lightweight yet strong materials that reduce inertia while maintaining robustness. High-strength alloys and specialized polymers are used in finger joints and structural components to ensure long-term durability. For our human robot hand, these materials allow us to create slim, compact designs without sacrificing strength, making them ideal for tasks in confined spaces or delicate assembly operations. Additionally, advanced coatings and surface treatments enhance wear resistance and longevity, ensuring consistent performance over millions of cycles. By integrating these materials thoughtfully, our humanoid robot hand achieves a balance of flexibility, resilience, and energy efficiency that is critical for modern automation.
Actuators: Driving Precision in Every Movement
Equally important to the design of a human robot hand are the actuators that power its motion. Our team at DH-Robotics carefully integrates electric, servo, and micro actuators to deliver smooth, controlled, and repeatable movements. The actuators in our humanoid robot hand allow for precise adjustment of gripping force, speed, and finger positioning, making them ideal for handling both fragile and heavy objects. By combining direct-drive systems with advanced feedback loops, we can ensure high-speed operation with minimal backlash or delay. This level of control is what enables our robotic hands to perform adaptive gripping, fine manipulation, and complex sequential tasks with the accuracy expected in high-performance industrial environments.
Real-World Application: Materials and Actuators in Action
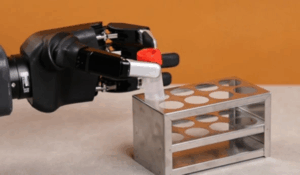
When materials and actuators are combined effectively, the result is a human robot hand capable of performing in a variety of real-world scenarios. At DH-Robotics, our humanoid robot hand is applied in collaborative automation, research labs, medical handling, and manufacturing assembly lines. The careful selection of lightweight, durable materials ensures that our hands can operate safely and efficiently in tight spaces, while the actuators provide responsive, repeatable performance. By optimizing the synergy between components, we create robotic hands that are not only precise and strong but also adaptable to changing task requirements. These innovations allow our clients to streamline processes, reduce downtime, and achieve higher production efficiency.
Pioneering the Future of Dexterous Robotics
We at DH-Robotics are aware that precise material and actuator integration is essential to the development of a human robot hand or humanoid robot hand. We develop robotic hands that are dependable, flexible, and able to handle the most challenging industrial tasks by fusing cutting-edge engineering, high-performance parts, and clever design. In order to ensure that every robotic hand we provide improves productivity, accuracy, and safety in automation systems across the globe, our team is still dedicated to pushing the boundaries of dexterous robotics.
