

























大寰机器人亮相 2026 世界人工智能大会
简介
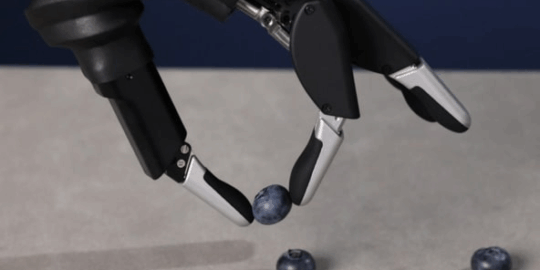
大寰机器人很高兴宣布将参展 2026 世界人工智能大会(WAIC),这是全球顶尖的人工智能与机器人行业展会之一。 诚邀各位莅临上海展区,一同体验我们在灵...
查看详情






 微信扫一扫
微信扫一扫
"*" 为必填字段