





















在智慧工厂的宏大蓝图里,你是否也曾被这样的场景困扰:
-
产线变更,需要耗时数周重新布局,费时费力? -
高精度装配环节,因传送带的抖动与精度缺失,良品率难以突破? -
顶升定位导致节拍慢? -
为对粉尘、洁净度要求,不得不付出高昂的维护成本? -
渴望实现多品种、小批量的柔性生产,却被“僵化”的设备拖慢了脚步?
这些,正是传统输送系统为智能制造设下的瓶颈。生产线的柔性与智能化已成为提升竞争力的关键因素。
告别“拖、磨、低效”,直面传统生产之痛
intelligent Flexible Motion
从被动“输送”,到主动“赋能”
intelligent Flexible Motion
这是一场关于“运动”的智能与功能进化。传统观念里,输送系统只是产线的“传送带”,一个被动的、基础的工具。它负责将物料从A点移到B点,却无法理解生产的节奏,更无法响应工艺的需求。
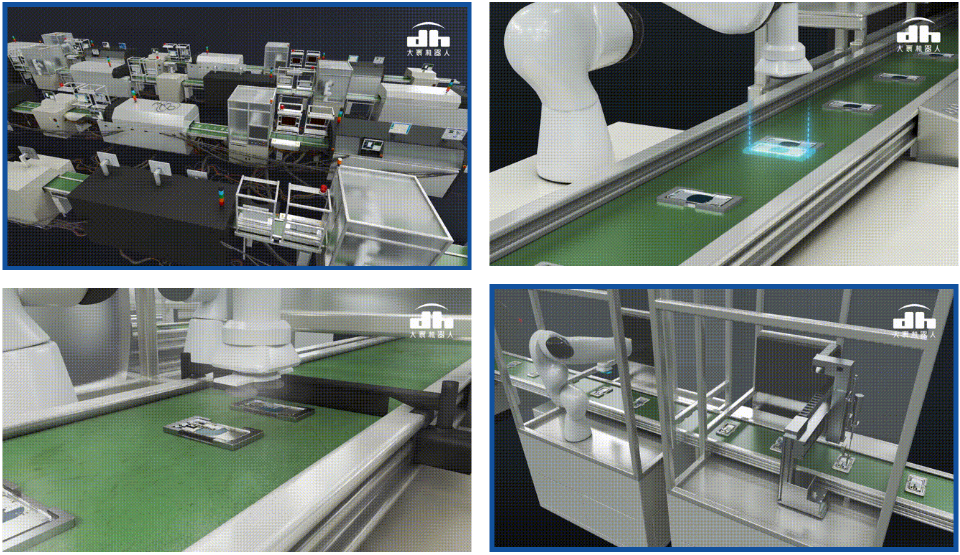
而大寰iFM智能柔性运动系统,打破了这一界限。从诞生之初,iFM就不只是一套“输送系统”,而是一套完整的“运动系统”。它不仅是工厂的“血脉”,负责流转物料;更是工厂的“智能神经”,能够感知、决策并协助执行复杂的生产指令。
它的革命性在于:将“移动”这一基础动作,升级为与生产流程深度协同的“智能运动”。
1. 核心技术:智能直驱技术,实现“零接触”输送
采用先进的智能直驱技术,动子仅与轨道接触,无机械摩擦,从根本上解决了粉尘、磨损与维护的难题。这不仅意味着更长的使用寿命,更能轻松满足半导体、光伏、生物制药等高洁净度生产环境的严苛要求。

2. 极致柔性:像“搭积木”一样搭建产线
-
模块化设计
独立的动子与轨道模块,支持环形、上下接驳、平行物流三种形态,可根据生产需求快速拼接、轻松扩展。

- 超强拓展性
单系统最高支持200个动子协同工作,轨道可延展至200米,自由组合256个工位。产线布局不再是难题,空间利用率得到极致提升。

- 动子独立可控
每个动子都是一个独立的“智能载体”,可实现独立运动、组合运动、反向运动,轻松应对复杂工艺流程。

3. 领先性能:速度、精度与负载的完美平衡
- 国际领先速度
最高速度4m/s,最大加速度4G,让生产节拍飞跃式提升。

- 微米级精度
重复定位精度高达±5μm。结合大寰自主研发的绝对编码器,动子就位即精准,无需二次定位,为高精度加工与装配保驾护航。

- 强劲负载
单位负载达15KG,超强双面驱动系统提供高单位推力密度,稳定可靠。
4. 打通产线信息与控制孤岛
iFM搭载大寰自主研发的先进控制器,其革命性在于能够在同一平台上,同时高精度地控制iFM和外部轴设备。

这意味着,无需再为多个独立系统之间的复杂通信和协同而烦恼,实现了从“单点控制”到“系统级协同”的跨越。
5. 智慧赋能:让操作与运维更简单、更智能
- 振动抑制技术
确保即使在高速移动或紧急制动状态下,也能实现平稳、精准的定位。
- 无线供电方案(可选)
彻底告别摩擦供电,实现真正意义上的任意位置不断电,0摩擦供电消除了传统电缆拖动带来的磨损与粉尘问题。同时,无接触火花,安全性高。
- 图形化配置与实时监控
通过直观的软件界面,即可轻松完成产线配置与调度。实时监控系统状态,运维效率大幅提升,布线简化高达60%,工程实施周期显著缩短。

ABOUT DH-ROBOTICS
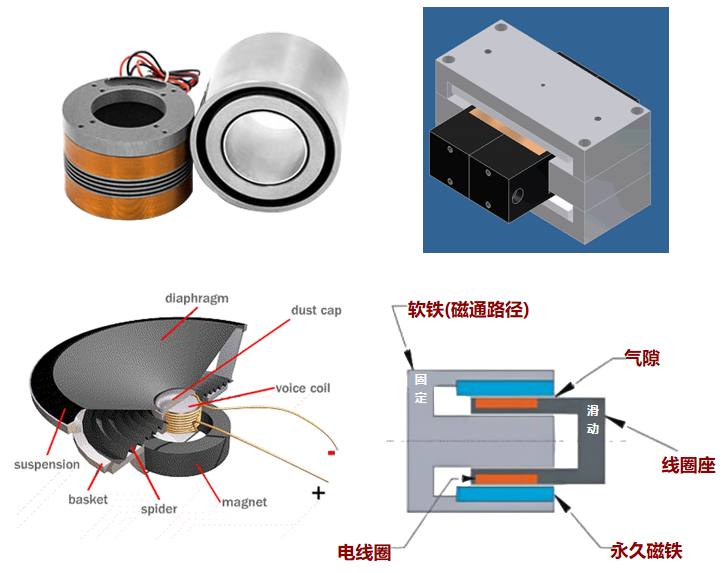
大寰机器人(DH-ROBOTICS)成立于2016年,是一家专注于为工业智能制造场景提供核心零部件的高科技企业。大寰机器人深耕精密运控领域,填补了国内精密执行器领域的空白,拥有伺服电动夹爪、音圈执行器、伺服电缸、灵巧手、iFM 智能柔性运动系统等多系列的200+产品,为3C、新能源、半导体等行业提供柔性化、智能化、低碳化的电动执行器产品与解决方案,助力客户提升生产效率,推动智能制造与可持续发展。



















01.jpg)
