
























核心任务
基于自主研发的以精密力控为核心的伺服控制系统,大寰为全球各行业的客户提供多样的智能抓取产品,良好适配检测、分拣、搬运、组装等各个场景,赋予智能制造以更高的精度、更好的易用性及更强的稳定性。
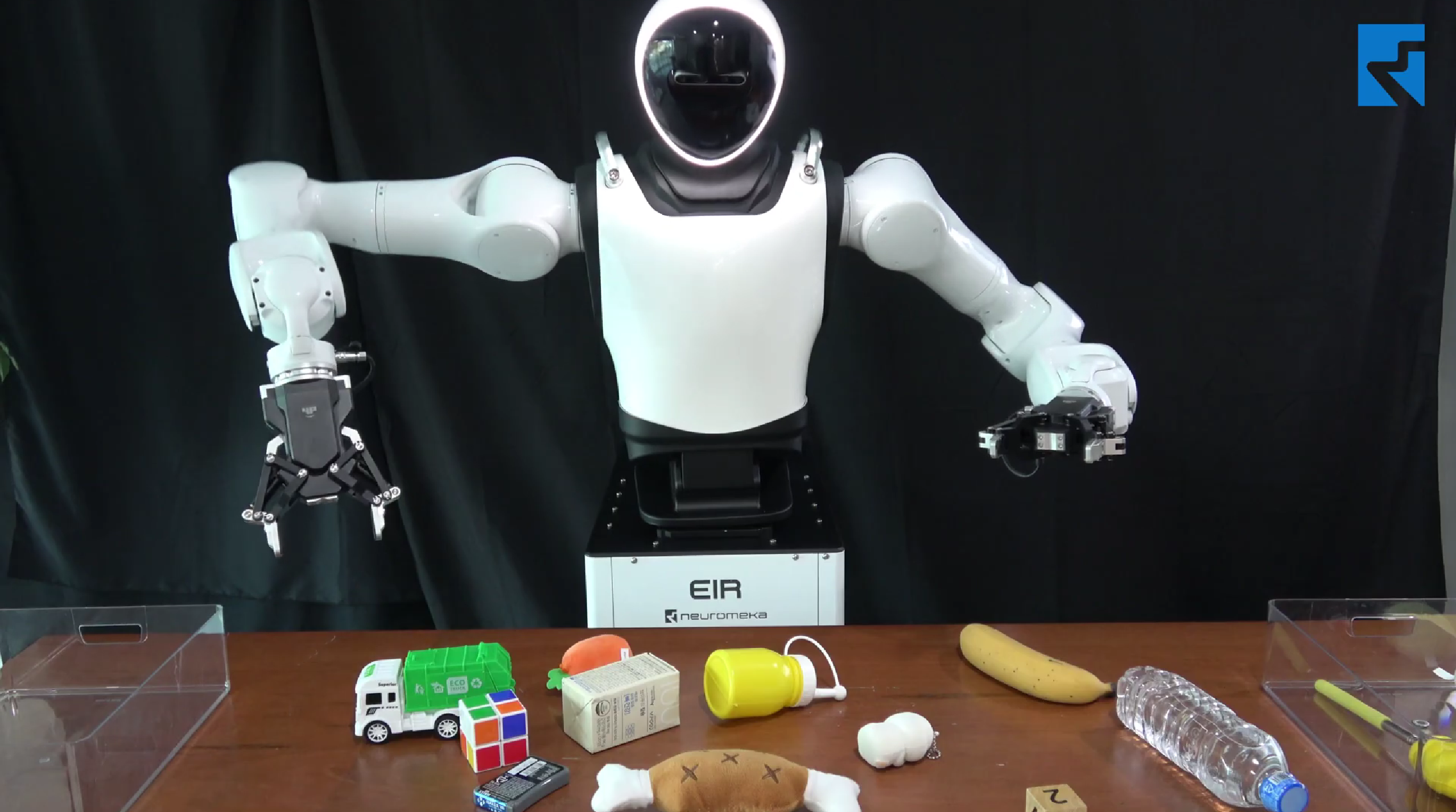
AG自适应电爪+纽路麦卡|未知物体即抓即用:无需训练的多物体夹取
大寰AG电爪采用关节型自适应结构,可自动贴合异形、曲面、软硬不同的未知物体。配合纽路麦卡Zero-shot技术,无需预先训练即可即时决策抓取策略。长行程与大夹持力提供泛化抓取的物理基础,即插即用设计让AI决策与夹爪动作快速联动。该演示体现了具身智能零样本抓取能力——不依赖预设模型,即时适应任意形态物体。为通用物体操作、开集分拣等前沿场景提供可靠的末端执行器方案。
使用产品
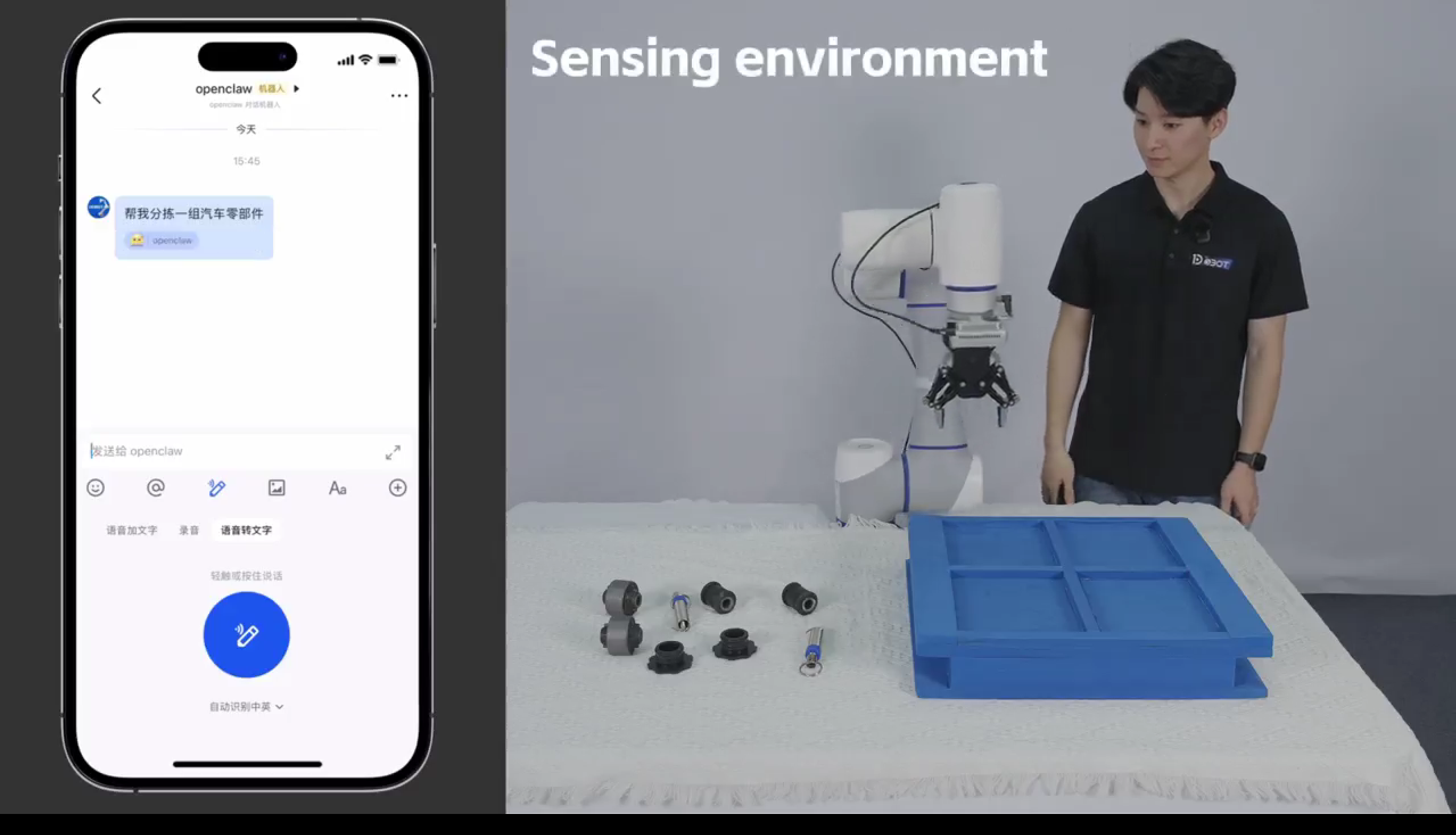
AG自适应电爪+越疆机器人跨界演示|从汽车零件分组到精密智能煮汤圆
汽车零部件分组:AG电爪凭借大夹持力与±0.03mm重复精度,稳定抓取金属零件并精准摆放。关节型自适应结构贴合异形件表面,有效防滑。
夹持炊具煮汤圆:AG电爪利用长行程与自适应握柄能力,稳定夹持漏勺、锅铲等炊具完成捞取动作。即插即用让两种任务快速切换,无需更换夹爪。
该演示凸显AG夹爪在混线生产、柔性自动化中的强适应性——既能产线分零件,也能生活夹炊具,为协作机器人提供真正多功能的末端执行器。
使用产品
聆动通用机器人×大寰AG夹爪 | 工规级具身智能+大夹持力末端执行器联合展示
与聆动通用机器人的协同演示,充分展现了大寰AG夹爪在柔性自动化、智能制造夹持领域的适配能力,其包络自适应结构与抓力可调功能,可灵活应对不同形状与材质的工件,配合抓取反馈与掉电自锁,为产线物料拾取、多品种混线生产提供可靠的末端执行器解决方案。
使用产品

AG高刚性电爪+海克斯康|宝马工厂零件组装
大寰AG电爪采用包络自适应设计,可抓取不同尺寸的汽车零部件,±0.03mm重复精度确保车规级装配质量。大夹持力防滑结构稳定抓取金属及塑料件,长行程适应多型号混线生产。即插即用快速集成,满足工业装配线对柔性换型的严苛要求。该方案为宝马供应链及欧洲汽车制造提供了可靠的末端执行器,推动产线自动化向高精度、高柔性升级。
使用产品

AG自适应电爪+天创机器人|电力巡检抓取
大寰AG电爪凭借±0.03mm重复定位精度,精准完成变电站操作与输电线路夹持等精细任务。关节型自适应结构配合长行程 与大夹持力,可稳定抓握不同直径的线缆及设备,适应杆塔、架空线路等复杂环境。即插即用设计让巡检机器人快速部署。该方案为机器人电力巡检与无人巡检自动化提供了可靠的末端执行器,助力特种机器人在高压、狭小空间中安全高效作业。
使用产品

PGE微型力控电爪+节卡机器人|商超饮料抓取
大寰PGE电爪厚度仅18mm,可轻松进入紧凑货架间隙。凭借力控精度0.1N的连续可调抓取力,实现对饮料瓶的防滑无损抓取,避免压坏包装。快速开闭0.15s 满足高速分拣需求,搭配薄型电动夹爪的低惯性设计,提升机器人运动速度。该方案为零售自动拣选、无人自动售货等具身智能商超场景提供了可靠的末端执行器,推动协作机器人在商业服务中的落地。
使用产品


AG高精度电爪+节卡机器人|带线缆插头插接:±0.03mm重复定位精准盲插
大寰AG电爪凭借±0.03mm重复定位精度,实现连接器装配与汽车线束插装的高一致性。关节型自适应结构配合长行程与大夹持力,可稳定抓握不同规格的插头,并利用长行程对准接口避免碰撞。即插即用设计让产线快速切换型号。该方案为精密插装自动化与人形机器人装配提供了可靠的末端执行器,助力柔性线束装配场景高效稳定运行。
使用产品

AG自适应电爪+节卡K1W轮式人形|汽车内部构件上下料实战
在汽车智能制造场景中,AG电爪凭借关节型自适应结构与长行程,可稳定抓取汽车内饰件、仪表板支架等异形汽车件,实现重载抓取稳定性与车用零部件装配的高效协同。即插即用设计让轮式人形机器人快速适配柔性装配线,大幅降低部署时间。这一方案为汽车内部构件上下料提供了可靠的大夹持力夹爪选择,助力轮式人形机器人在汽车产线中的落地应用。
使用产品

AG搬运电爪+中科新松轮式人形|线边仓物料搬运实战
在智能线边仓场景中,大寰AG电爪凭借高精密设计,实现重物平稳夹持与物料箱搬运防滑,高效完成产线物料配送和工位间转运。轮式人形机器人的灵活移动与电爪的协同配合,展示了轮式人形协同搬运的实用价值。这一厂内物流自动化方案为制造业提供了可靠的搬运末端执行器选择,助力产线物料流转更智能、更安全。
使用产品

AG自适应电爪+珞石双臂|CPU自主装配与精密芯片安装
在精密电子制造场景中,大寰AG电爪凭借高精度夹爪的细腻控制,实现CPU无损抓取和CPU插槽安装,有效保护敏感电子元件。这一双臂协同方案为芯片装配及微型精密夹持提供了可靠的末端执行器选择,推动具身智能装配在3C电子行业的落地应用。
使用产品

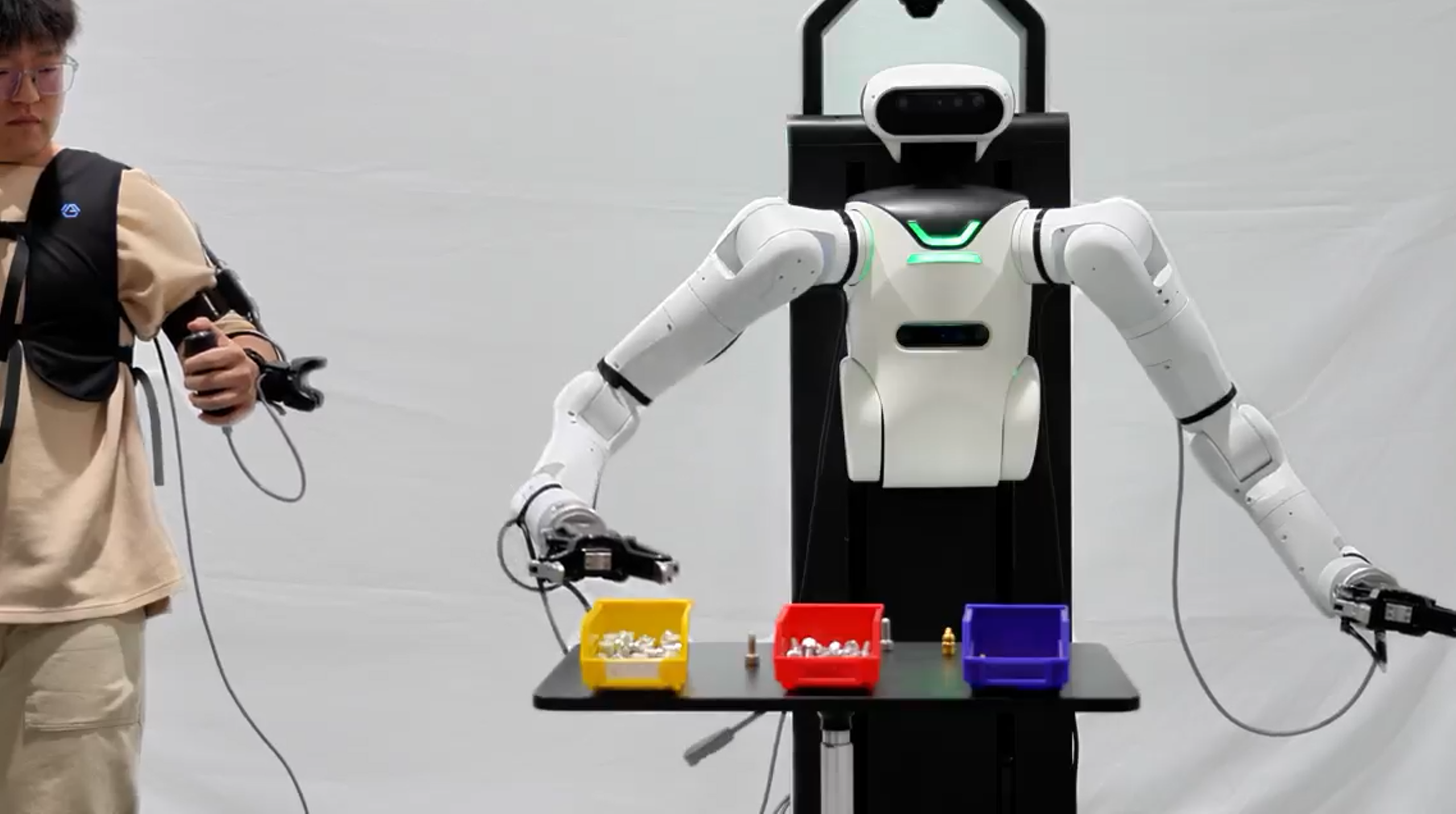
AG自适应电爪 + JAKA双臂|零件抓取分类与遥操实战
通过双臂协同遥操,大寰AG电爪凭借自适应抓取异形件能力,稳定完成精密零件夹持与工件分拣,并实现遥操抓取精度与双臂协同防碰撞的高效融合。同时,抓取反馈与掉落反馈实时监测夹持状态,避免工件意外脱落。该方案为人机协作、具身智能及柔性制造提供了可靠的双臂夹爪末端执行器选择,助力复杂零件分拣自动化升级。
使用产品
PGC电爪助力人形机器人 | 领益智造产线仓储混料分拣
配合领益智造产线,人形机器人搭载大寰电动夹爪,完成物料自动分拣与物料识别同步抓取。大寰PGC电爪凭借精准力控技术,在混料环境中实现力控抓取防损伤,并确保自动分拣夹爪行程高效稳定。此外,PGC电爪支持指尖定制——可根据不同物料形态灵活更换指尖材质与形状,进一步提升抓取适配性与稳定性。这一方案为智慧物流与具身智能场景提供了可靠的末端执行器选择,推动仓储自动化迈向更柔性、更智能的阶段。
使用产品


PGC电动夹爪 | 动力电池电芯上下料:精准力控搬运,助力上汽通用&智元产线
配合上汽通用与智元自动化产线,大寰PGC电爪凭借精准力控技术,实现对电芯的柔性抓取与平稳搬运,有效避免电芯表面划伤或压痕。相比传统气爪,电动夹爪在电芯上料过程中可实时调节夹持力与位置反馈,显著提升PACK自动化线的良品率与生产稳定性。该方案广泛适用于锂电池电芯装配、方形电芯夹持、电芯自动上料等环节,为锂电设备及新能源制造提供可靠的末端执行器选择。
使用产品





抓取耳机进行擦胶
无线蓝牙耳机组装完后,外壳封装会溢胶,需要将溢出的胶擦除;通过使用协作机器人+六维力传感器做擦胶力控,电爪夹持耳机打磨。
气爪夹持力不稳定,容易对耳机表面造成损伤,故选择力控精准的电爪,进行耳机夹持。
使用产品

实验室自动化应用
以“大寰电爪+机械臂”的组合,完成桌面上的小型实验室自动化全流程应用。从夹取、称重、取液、合盖到放回原处复位,全流程均由电爪和机械臂全主导,能够实现完全的无人化操作。
使用产品

